Ультразвуковые преобразователи изображений
Одним из важнейших функциональных узлов систем формирования и отображения ультразвуковых эхоизображений являются ультразвуковые преобразователи (УЗП). Они выполняют электроакустическое преобразование энергии при формировании зондирующих ультразвуковых импульсов заданной частоты и, наоборот, акустоэлектрическое преобразование эхосигналов при приеме. Кроме того, УЗП выполняют функции акустических антенн, осуществляющих концентрацию зондирующей акустической энергии в узком луче, его сканирование и пространственную селекцию принимаемых эхосигналов. Для систем ультразвуковой визуализации характерно то, что именно электроакустические и антенные (полевые) характеристики УЗП определяют разрешающую способность получаемых эхоизображений. Поэтому к УЗП предъявляются высокие требования по чувствительности, пространственной направленности излучения и приема, возможности преобразования коротких сигнальных импульсов. Кроме того, важным является достигаемая тем или иным преобразователем область ультразвукового «обзора», частота сканирования этой области, а также массо-габаритные параметры и сложность управления.
В системах, обеспечивающих получение только А и М-эхо- грамм, применяются так называемые одномерные преобразователи, а в системах двухмерной визуализации – сканирующие УЗП. В зависимости от способа реализации сканирования ультразвукового луча преобразователи делятся на две основные группы: с механическим и электрическим управлением. Преобразователи независимо от способа управления могут делиться по функциональному назначению, по виду сканирования, а также по конструктивным признакам, например, контактные или иммерсионные, портативные или стационарные и т. д.
При построении преобразователей с механическим сканированием в основном применяются одномерные преобразовательные элементы, а электрически управляемые УЗП требуют использования многоэлементных матриц пьезопреобразователей. В качестве пьезоактивного материала в современных УЗП применяется в основном пьезокерамика. Другие материалы, например монокристаллы и пьезополимеры, используются крайне редко. Обычно преобразователи линейного сканирования обеспечивают путь перемещения ультразвукового луча в пределах 200 мм, секторного сканирования– 90°, комбинированного сканирования – 400X400 мм. Высокую частоту сканирования более 10 Гд обеспечивают электрически управляемые преобразователи и механически управляемые преобразователи углового сканирования.
Для надежного ввода и вывода акустической энергии в процессе сканирования исследуемого объекта постоянный акустический контакт с ним поддерживается путем использования специального геля или минеральных масел, которыми смачиваются рабочая поверхность преобразователя и поверхность исследуемого объекта. Часто в преобразователях с механическим управлением для этой цели применяется дополнительная промежуточная среда – жидкость. Такие преобразователи называются иммерсионными.
Одномерные УЗП
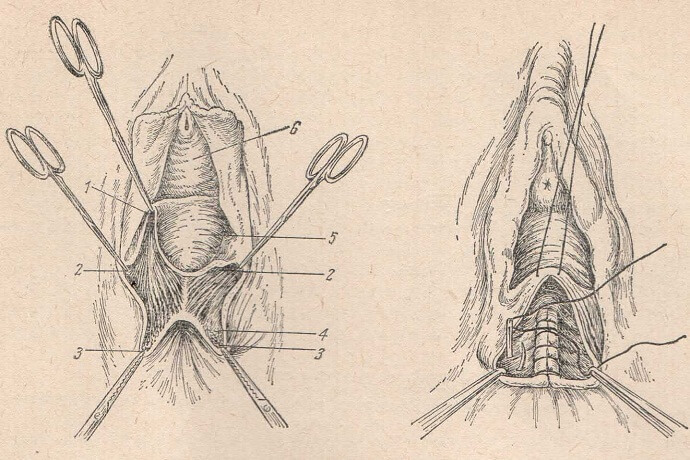
Типовая конструкция показана на рис. 25. Основными составными элементами одномерного преобразователя являются: пьезоэлемент, согласующий слой, демпфер и корпус-экран с разъемом для соединения преобразователя с ультразвуковым эхоскопом. Главным (первичным) элементом УЗП является пьезоэлемент, выполняющий функции электроакустического преобразования. Пьезоэлемент чаще всего изготавливается из цирконата-титаната свинца – пьезокерамического материала, имеющего в ультразвуковом диапазоне частот неплохие электроакустические характеристики, дешевого, хорошо поддающегося механической обработке. Обычно пьезоэлемент имеет форму диска, покрытого с двух противоположных сторон металлическими электродами. Внешняя (рабочая) сторона пьезоэлемента покрывается слоем согласующего материала, а электрод электрически соединяется с корпусом и заземляется. Корпус, кроме основных конструктивных функций, используется также в качестве электрического экрана, поэтому он изготавливается из легкого металла, либо из пластмассы и металлизируется изнутри. Внутренний электрод пьезоэлемента изолируется от корпуса и соединяется с центральным штекером соединительного разъема. Тыльная сторона пьезоэлемента покрывается демпфирующим составом.

Рис. 25. Сечение одномерного УЗП. 1 – катушка индуктивности; 2 – демпфер; 3 – разъем; 4 – корпус – экран; 5 – пьезоэлемент; 6 – согласующий слой.
При подаче на пьезоэлемент переменного напряжения электрической энергии из-за пьезоэффекта возникают механические толщинные колебания пьезокерамического диска, которые через согласующий слой поступают в исследуемую среду и распространяются в ней в виде продольных ультразвуковых волн. Толщина согласующего слоя и его материал выбираются такими, чтобы максимальное количество ультразвуковой энергии, генерируемой пьезоэлементом, трансформировалось в среду. Как правило, толщина согласующего слоя устанавливается равной Х/4, где Я – длина ультразвуковой волны в среде. Материал слоя выбирается с минимальным затуханием ультразвука в нем и удельным волновым сопротивлением. Возможно применение также нескольких согласующих слоев одинаковой толщины, но с плавно изменяющейся величиной волнового сопротивления.
Толщинные колебания пьезоэлемента передаются также в его тыльную сторону, где во избежание реверберационных помех они поглощаются демпфирующим составом. Состав демпфера, как правило, обеспечивает большое затухание ультразвука в нем и имеет волновое акустическое сопротивление равное или превышающее сопротивление пьезокерамики. Для получения очень коротких ультразвуковых импульсов (с 1-2 периодами колебаний) хорошо себя зарекомендовал согласованный демпфер, изготовленный на основе пьезокерамического материала.
Пьезоэлемент УЗП чаще возбуждается одиночным импульсом электрического напряжения, поэтому излучаемые и принимаемые преобразователем ультразвуковые колебания определяются в основном частотными (резонансными) свойствами пьезоэлемента и его, как резонатора, добротностью. Обычно эквивалентная добротность УЗП, применяемых в эхоскопии, колеблется в пределах от 2 до 10, что позволяет формировать зондирующие импульсы, имеющие 2-4 периода колебаний, с частотой, равной частоте механического резонанса пьезоэлемента, при которой толщина пьезоэлемента равна половине длины ультразвуковой волны в нем. Более подробное рассмотрение вопросов построения одномерных УЗП с заданными электроакустическими характеристиками читатель может найти, например, в монографии [25].
Антенные свойства УЗП и характеристики направленности формируемых ими лучей определяются в основном размерами их рабочей поверхности (апертуры), выраженной в длинах волн излучаемого ультразвука. Если размеры апертуры значительно превышают длину ультразвуковой волны, УЗП обеспечивают концентрированное излучение и селективный прием ультразвуковых сигналов вдоль оси, перпендикулярной плоскости в соответствии с принципом Гюйгенса. Форма ультразвукового луча и степень осевой концентрации акустической энергии в нем характеризуются известными соотношениями дальнего и ближнего волновых полей плоских УЗП. Протяженность ближнего волнового поля (зоны Френеля), имеющего цилиндрическую форму, для дискового преобразователя определяется соотношением его диаметра и длины волны.
Дальнее поле (зона Фраунгофера), начинающееся за ближним, характеризуется формой усеченного конуса с небольшим углом расхождения.
Если поверхность излучения вогнута, то ультразвуковой преобразователь обладает фокусирующими ультразвуковой луч свойствами, причем фокусное расстояние таких УЗП определяется радиусом кривизны излучающей поверхности. Необходимое фокусирующее действие может быть достигнуто также путем применения акустических линз, которые изготавливаются из материала со скоростью ультразвука в нем выше или ниже скорости ультразвука в исследуемой среде. В первом случае фокусирующая линза изготавливается плоско-вогнутой, во втором плоско-выпуклой (рис. 26). Следует отметить, что второй случай более благоприятен для практики, поскольку при нем легче осуществить акустический контакт с исследуемым объектом. Общим недостатком преобразователей с фокусирующей линзой является возможность реабилитации только определенного фокусного расстояния, что не позволяет получить постоянства ширины ультразвукового луча в большой зоне протяженности. Более гибкими в этом смысле являются одномерные УЗП с кольцевой матрицей. Апертура таких УЗП состоит из набора пьезокерамических колец различного диаметра (рис. 27). Электроды, покрывающие внешнюю сторону колец, соединяются между собой и заземляются, а к внутренним электродам возбуждающий электрический импульс поступает через фазовращающие (задерживающие) цепи так, что крайнее кольцо наибольшего диаметра запускается первым, а среднее, самое малое по диаметру кольцо (или диск), запускается последним. Такое возбуждение колец обеспечивает фокусировку ультразвукового луча на соответствующем расстоянии.

Рис. 26. Фокусировка ультразвукового луча при использовании вогнутой (а) и выпуклой (б) акустических линз. 1 – линза; 2 – демпфер; 3 – пьезоэлемент; 4 – ультразвуковой луч: Ci, Сг, Сз – скорости ультразвука в линзах и рабочей среде, соответственно (а - Ci>C3, б – С2<с3).

Рис. 27. Кольцевая матрица пьезоэлементов: 1 – пьезоэлемент; 2 – металлические электроды; 3 – акустический изолятор.
Варьированием величиной задержек в фазирующих цепях можно соответственно перемещать фокусное пятно по аксиальной линии луча. Производя аналогичную процедуру при приеме эхосигналов можно реализовать динамическую фокусировку ультразвукового луча, суть которой в том, что в процессе приема эхосигналов фокусное расстояние динамически меняется и следит за фронтом распространяющейся и отраженной ультразвуковых волн. Таким образом, прием эхосигналов на всей осевой протяженности по глубине осуществляется из зоны фокуса с высокой поперечной разрешающей способностью.
Ультразвуковые преобразователи с механическим сканированием луча
Для механического сканирования ультразвукового луча используются одномерные (одноэлементные и многоэлементные– кольцевые) преобразователи, перемещение ультразвукового луча которых осуществляется в результате механического движения преобразовательного элемента, либо путем движения акустического рефлектора при неподвижном преобразователе. В настоящее время наиболее широкое применение на практике получили три основных типа механически к сканирующих преобразователей: устройства с шарнирно-рычажным механизмом сложного сканирования вручную, преобразователи углового (секторного, радиального и веерного) сканирования, а также иммерсионные сканирующие системы многоракурсного – комбинированного сканирования.
Сканирующие устройства первого типа представляют собой рычажно-шарнирный механизм, один конец которого закреплен, а другой – подвижен. К подвижному рычагу механизма при помощи шарнира закреплен одномерный УЗП, который имеет возможность перемещаться в одной плоскости. Механическое сканирующее устройство данного типа обеспечивает ручное перемещение преобразователя в плоскости сканирования при непосредственном его контакте с исследуемым объектом. Кроме того, устройство формирует электрические сигналы, определяющие положение преобразователя на объекте и направление ультразвукового луча в исследуемой среде. Преимуществом контактных сканирующих устройств такой конструкции является возможность формирования высококачественных ультразвуковых изображений при большом поле ультразвукового «обзора». Основной недостаток – значительное время формирования эхоизображения, препятствующее отображению движения исследуемых объектов.
Другой распространенной формой реализации преобразователей механического сканирования являются устройства углового сканирования. В зависимости от функционального назначения преобразователи углового сканирования могут выполняться разной конструкции. Различают наружные преобразователи секторного сканирования, предназначенные для кардиологических, абдоминальных и других областей исследования, и внутрйполостные преобразователи радиального сканирования, предназначенные для исследования, например, в урологии.
Преобразователи механического секторного сканирования, предназначенные для кардиологии, должны обеспечить высокую скорость движения ультразвукового луча, иметь достаточно компактную конструкцию, чтобы осуществить ведение ультразвукового наблюдения сердца через межреберное пространство. Такие преобразователи строятся в основном по принципу механической «качалки». В качестве преобразовательного элемента здесь применяются одноэлементные структуры или кольцевые матрицы, аналогичные таковым в устройствах «ручного» сканирования. При сканировании преобразователь поворачивается относительно нормали к рабочей поверхности в одну и другую сторону, осуществляя качание ультразвукового луча в заданном секторе. Схематическое изображение конструкции преобразователя такого типа приведено на рис. 28, а, б, в, г. Когда требования к габаритным размерам рабочей поверхности преобразователя не столь жестки, возможны и другие конструкции преобразователей секторного сканирования, например, на основе использования вращения нескольких одноэлементных преобразователей, размещенных в одной плоскости перпендикулярно друг к другу. Сканирование ультразвукового луча здесь достигается вращением преобразователей вокруг оси симметрии их размещения и коммутацией элементов. Другой конструкцией подобного типа является применение ленточного протяжного механизма с закрепленными на нем преобразователями. Подобные конструкции требуют применения иммерсионной промежуточной среды между преобразователем и исследуемым объектом, поскольку колебательные или вращательные движения соприкасающихся с поверхностью.

Рис. 28. Виды УЗП-преобразователей. а – преобразователь типа механической качалки; б – секторно-сканирующий механический преобразователь с локальным иммерсионным резервуаром.
")
Рис. 28. (Продолжение).
Механическое сканирующее устройство данного типа обеспечивает ручное перемещение преобразователя в плоскости сканирования при непосредственном его контакте с исследуемым объектом. Кроме того, устройство формирует электрические сигналы, определяющие положение преобразователя на объекте и направление ультразвукового луча в исследуемой среде. Преимуществом контактных сканирующих устройств такой конструкции является возможность формирования высококачественных ультразвуковых изображений при большом поле ультразвукового «обзора». Основной недостаток – значительное время формирования эхоизображения, препятствующее отображению движения исследуемых объектов.
Следует привести еще одну конструкцию секторного преобразователя, в которой используется неподвижный преобразователь, а сканирование осуществляется вращением акустического рефлектора. В такой разновидности УЗП очень удобно применять в качестве преобразовательного элемента кольцевую матрицу, поскольку неподвижность преобразовательного элемента облегчает отвод сигналов с его электродов в процессе сканирования.
Третьей разновидностью систем, использующих механическое сканирование для формирования эхоизображения, являются стационарные установки для маммографии. Для перемещения УЗП здесь используются большие резервуары с жидкостью, имеющие значительную площадь поверхности, необходимой для акустического контакта с пациентом. В таких системах, как правило, применяется линейно-секторное или дуговое-секторное механическое сканирование УЗП. Подобные сканирующие системы обеспечивают широкое поле ультразвукового «обзора» при достаточно высоком быстродействии, однако являются очень сложными, громоздкими и дорогостоящими. В то же время высокое качество получаемых эхоизображений, особенно таких слабоконтрастных для ультразвука органов, как молочная железа, оправдывает затраты. Поэтому наряду с другими и этот тип ультразвуковых преобразовательных систем также успешно развивается [13].
УЗП с электрическим сканированием луча
Они хотя и обладают большей сложностью электрических схем управления, постепенно вытесняют преобразователи с механическим сканированием, несмотря на относительную простоту конструкции и дешевизну последних. Это связано, во-первых, с тем, что электронные системы управления обеспечивают значительно большие возможности по режимам фокусировки и сканирования ультразвукового луча, а во-вторых, с постоянно снижающимися ценами на интегральную электронику. Кроме того, электрически управляемые УЗП не требуют применения иммерсионных средств акустического согласования преобразовательных элементов с рабочей средой, обеспечивают высокую скорость сканирования, надежность и долговечность эксплуатации, что является важным их преимуществом.
УЗП с электрическим сканированием луча, в зависимости от способа управления лучом, делятся на две основные группы преобразователей: с фазированной матрицей пьезоэлементов и коммутационные. УЗП с фазированной матрицей применяются только для реализации секторного сканирования, а коммутационные – для линейного, секторного, веерного и радиального видов ультразвукового сканирования.
Фазированная матрица представляет собой линейную антенную решетку полосковых пьезоэлементов, слабо направленных в плоскости сканирования луча (рис. 28 в, г). В состав матрицы входит до несколько десятков первичных пьезоэлементов, расположенных эквидистантно в одной плоскости, с шагом меньше длины рабочей ультразвуковой волны. Зазоры, разделяющие пьезоэлементы, обеспечивают акустическую развязку отдельных элементов между собой. Для согласования акустических импедансов пьезоэлементов со средой и расширения полосы электроакустического пропускания рабочая поверхность матрицы, так же как и в одномерных УЗП, покрывается слоем согласующего материала, тыльная сторона–демпфером.

Рис. 29. Обобщенная структура сканирующего устройства на основе фазированных (а) и коммутационных (б) матриц. 1 – матрица пьезоэлементов; 2 – фазирующие цепи; 3 – передающие и приемные каналы; 4 – управляющие цепи; 5 – дисплей; 6 – объект исследования; 7 – волновой фронт; 8 – одновременная коммутируемая группа пьезоэлементов; 9 – ультразвуковой луч; R – ультразвуковой луч, X, V – линейная и угловая переменные соответственно; Fi, F1, F3 – фокусные расстояния; AF – линейное отклонение при «подкачке» луча.
Электрическое управление направлением ультразвукового луча, формируемого матрицей, осуществляется при помощи фазирующего устройства (рис. 29,а). Фазирующее устройство обеспечивает введение соответствующих задержек в передающие и приемные цепи отдельных пьезоэлементов матрицы, чем создается требуемое амплитудно-фазовое распределение сигналов на апертуре матрицы, вызывающее фокусировку и отклонение ультразвукового луча в пределах заданного сектора сканирования. Поскольку линейные размеры фазированной решетки не оказывают существенного влияния на величину сектора сканирования ультразвукового луча, они могут быть выбраны достаточно малыми. Длина подобной решетки обычно составляет от 1 до 4 см, ширина от 1 до 2 см, что позволяет использовать устройства с фазированной матрицей в труднодоступных для создания надежного акустического контакта местах, например, при исследовании сердца через межреберное пространство, а также в педиатрии и при внутри полостных исследованиях.
Однако наличие в составе схем фазирования большого числа широкополосных линий задержки значительно усложняет конструкцию преобразователей с фазированными матрицами, особенно при аналоговом управлении временем задержки. Кроме того, существенным недостатком таких преобразователей является ограниченный коэффициент акустической энергии в ультразвуковом луче и наличие значительных боковых лепестков, вызванных конечной (по сравнению со сплошным преобразователем той же площади) дискретностью решетки. Этот недостаток приводит к некоторому снижению разрешающей способности сканирующего УЗП и ограничению возможности дифференцировать структуру ткани в большом динамическом диапазоне акустического контраста. Поэтому преобразователи с фазированной матрицей до сих пор нашли ограниченное применение в практике. Вместе с тем создание электроакустических узлов, совмещающих функции преобразования и задержки сигналов в сканирующих УЗП [83], и широкое внедрение последних достижений микроэлектроники позволяет полагать, что в ближайшем будущем сканирующие устройства с фазированными матрицами пьезоэлементов станут более компактными, надежными, дешевыми и информативными.
Другим распространенным типом электрически сканирующих УЗП является устройство с шаговым сканированием ультразвукового луча коммутационных решеток пьезопреобразователей. Перемещение ультразвукового луча в таких устройствах достигается путем последовательного электрического переключения пьезоэлементов матрицы с дискретностью, равной ширине одного элемента.
Коммутационные матрицы позволяют реализовать в принципе различные виды ультразвукового сканирования, в зависимости от формы сканирующих апертур (рис. 29, б). Однако на практике до настоящего времени в основном применялись линейно- и веерно-сканирующие матрицы. Линейные и веерные (конвексные) коммутационные матрицы отличаются от фазированных только пространственной протяженностью самой матрицы и числом пьезоэлементов. В данном случае для обеспечения достаточной протяженности перемещения ультразвукового луча требуются, например, матрицы длиной до 100 мм и более, с числом пьезоэлементов, достигающим несколько сотен. Шаг сканирования ультразвукового луча в этом случае зависит от размеров элементов и составляет несколько периодов ультразвуковых волн. Для обеспечения необходимой разрешающей способности в управляющие цепи коммутационных матриц могут дополнительно включаться фазирующие элементы, обеспечивающие фокусировку и небольшую угловую подкачку луча при сканировании.

Последним приемом может быть обеспечено снижение дискретности перемещения луча, которая для этих матриц существенна. Реализация фокусировки и подкачки луча в коммутационных матрицах приводит к необходимости групповой коммутации элементов (см. рис. 29, б). В этом случае из матрицы выделяется группа смежных элементов, которые работают как обычные одномерные УЗП с апертурой, равной апертуре группы. В процессе зондирования среды все пьезоэлементы группы излучают и принимают соответствующие сигналы. Затем подключается следующая группа пьезоэлементов, смещенная относительно» предыдущей на один элемент, и процесс зондирования повторяется, обеспечивая последовательный ультразвуковой обзор некоторой области сканируемой среды. Благодаря групповой коммутации пьезоэлементов увеличивается апертура излучения – приема акустической антенны, чем обеспечивается лучшая направленность луча по всей глубине зондирования, а также повышается эффективность электроакустического преобразования. При конструировании УЗП с линейной коммутационной решеткой число пьезоэлементов, объединяемых в группу, определяется из требований разрешающей способности, чувствительности электроакустического преобразования и дискретности перемещения ультразвукового луча. Поскольку эти требования противоречивы, выбор осуществляется компромиссным путем.
Линейно- и веерно-сканирующие коммутационные УЗП находят широкое применение при построении современных динамических систем ультразвуковой визуализации благодаря небольшой массе, стоимости и относительной простоте электронных схем управления. В настоящее время преобразователи такого типа используются наиболее массово, на их основе строятся модификации, предназначенные для внутриполостных исследований, применения во время операций и пункций органов (рис. 30, а, б, в, г, д).

Рассмотренные выше случаи применения электрически управляемых матричных преобразователей не исчерпываются реализацией систем В-сканирования. Известен ряд исследовательских работ [63, 112, 118], где подобные матрицы образуют составную часть устройств С-сканирования. В этих устройствах сканирование в двух плоскостях осуществляется совмещением быстрого электрического сканирования ультразвукового луча в плоскости линейной матрицы и механического перемещения ее в перпендикулярном направлении. В данном случае возможен только иммерсионный вариант визуализации, что значительно усложняет конструкцию аппаратуры. Идеальным случаем визуализации методом С-сканирования следует считать применение двухмерных матриц пьезопреобразователей (рис. 31), однако несмотря на неоднократные попытки, промышленный вариант подобной системы сканирования создать до сих пор не удалось и это сильно ограничивает клиническое применение метода формирования фронтальных эхоизображений.

Рис. 31. Двухмерная матрица пьезоэлементов. 1 – пьезокерамическая пластина; 2 – электрический контакт от пьезоэлемента; 3 – демпфер; 4 – общий электрический контакт матрицы.
Задача разработки трехмерно-сканирующей системы чрезвычайно сложна: нужно не только сконструировать 104 (или более) элементных преобразователей и соединить их с 3-104 или 4-104 электронными схемами, но и создать систему многоканальной обработки сигналов, устойчиво работающую в течение длительного времени, все каналы которой взаимно сбалансированы. К сожалению, пока нет сведений о каких-либо результатах применения подобной системы в клинике. Поэтому трудно судить, оправдает ли себя увеличение сложности и, конечно, стоимости системы дополнительно полученной диагностической информацией. Тем не менее потенциальная универсальность таких систем оправдывает усилия, затрачиваемые на их разработку.