Выделение фрагментов изображений в интроскопии
При анализе геометрических параметров малоконтрастных изображений на сложном фоне, к которым, в частности, относятся рентгенограммы, термограммы и сонограммы, применяют интерактивные методы (с ручным управлением, выполняемым оператором) выделения информативных участков. На снимках подлежащие анализу фрагменты изображения выделяются путем обводки их границ. Наиболее часто для выделения фрагментов изображения на сложном фоне применяются устройства формирования на экране ВКУ светового маркера-курсора (которым оператор управляет с помощью клавишной панели), светового пера, планшета, шарового или рычажного электронномеханического манипулятора. Рассмотрим методы выделения фрагментов изображения более подробно.
Световое перо (СП)
В основу СП положен растровый принцип формирования изображения на ВКУ. На ВКУ в каждый момент времени максимум свечения имеет только одна точка, поэтому от СП будет поступать сигнал только тогда, когда электронный луч, вызывающий свечение экрана кинескопа, будет проходить в зоне захвата светового излучения от экрана оптическим узлом СП. Таким образом, момент появления сигнала в устройстве жестко связан с элементом растра, на который «смотрит» СП.
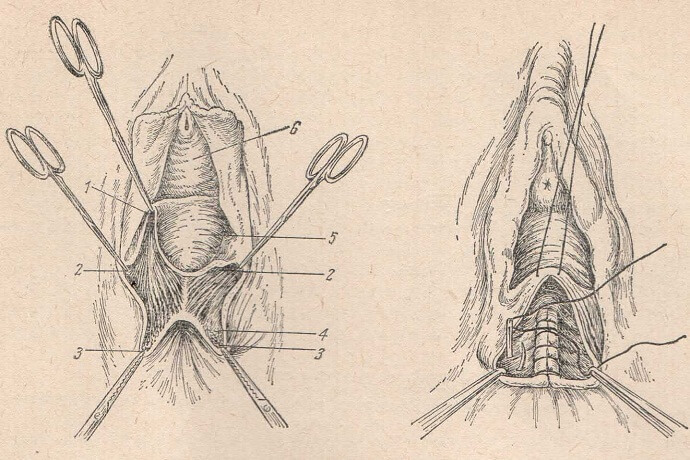
Наиболее часто используемое СП (рис. 47) состоит из оптического узла 1, фотоприемника 2 и предварительного усилителя 3, которые будучи объединены конструктивно в указку (около 1,3 мм в диаметре и 150 мм в длину) образуют собственно СП, соединенное гибким кабелем с остальными узлами, предназначенными для формирования короткого маркерного импульса (курсора) 4-8. Корпус СП имеет форму, удобную для того, чтобы держать его в руке и направлять на экран ВКУ. На корпусе находится либо кнопка для замыкания электрической цепи в момент начала работы, либо шторка, которая пропускает свет на фото-приемник только при нажатии пером на поверхность кинескопа.
")
Рис. 47. Устройство светового пера (СП)
При попадании светового потока от светящегося элемента растра на фоточувствительную поверхность фотоприемника (как правило, фотодиод или фототранзистор) на выходе предварительного усилителя формируется импульсный сигнал, длительность переднего фронта которого обусловлена в основном постоянной времени фотоприемника. Длительность заднего фронта определяется постоянной времени послесвечения люминофора, а амплитуда зависит от средней яркости участка экрана кинескопа, с которого падает свет на фотоприемник.
Для сбора на фотоприемник светового потока и уменьшения поля зрения СП служит оптический узел, который состоит из микрообъектива и диафрагмы, установленной в плоскости светочувствительной поверхности фотоприемника. В некоторых конструкциях в корпусе СП устанавливается только оптический узел, который соединяется с фотоприемником с помощью пучков оптических волокон.
Местоположение СП на экране ВКУ определяется временными интервалами, отсчитываемыми от кадрового и строчного синхронизирующих сигналов до переднего фронта сигнала, получаемого с выхода усилителя считывания. Неинформативный задний фронт сигнала исключается схемой выделения переднего фронта, осуществляющей дифференцирование сигнала, например, методом сдвига и вычитания.
Если СП работает от реального сюжета с широким динамическим диапазоном яркостей, то ток сигнала фотоприемника при переходе СП со светлого участка на темный и наоборот меняется в десятки раз. Это приводит к тому, что при постоянном уровне квантования устройства формирования маркерного импульса временное положение маркерного импульса от элемента изображения зависит от яркости этого элемента. Для уменьшения нестабильности положения маркерного импульса используют устройства следящего квантования (пороговые схемы), которые поддерживают уровень квантования на заданном уровне входного сигнала, например, на уровне Un=Uc/2. Таким образом, на выходе устройства квантования формируется импульс нормированном амплитуды с временным положением, не зависящим от величины сигнала.
В каждом кадре от СО в запоминающее устройство (ЗУ) должен поступать только один маркерный импульс, а СП, вследствие захвата оптическим узлом светового потока с нескольких строк, формирует пачку таких импульсов. Выделение одиночного маркерного импульса в телевизионном кадре производится триггером и схемой «И». Триггер устанавливается в исходное состояние кадровым синхронизирующим импульсом и сбрасывается по заднему фронту маркерного импульса, исключая прохождение через схему «И» последующих маркерных импульсов в данном телевизионном кадре. С выхода схемы «И» пропущенный маркерный импульс поступает на запись в ЗУ.
Как правило, пороговые схемы обеспечивают стабильность временного положения маркерного импульса с погрешностью, не превышающей длительности 1-2 элементов изображения, т. е. около 200–400 не при изменении величины сигнала от фотоприемника до 30 раз.
Передаваемые в ЗУ маркерные импульсы от СП затем циклически с частотой кадров (полей) считываются, образуя на экране ВКУ траекторию движения светового пера. Необходимый объем ЗУ, определяемый произведением количества строк Z в активной части поля телевизионного растра на число элементов изображения N вдоль каждой строки сканирования. Для растра с 256X256 элементами необходима емкость ЗУ, равная около 66 Кбит.
При очерчивании информативных участков на высококонтрастных изображениях изменение светового потока при переходе СП с темных мест сюжета на светлые становится настолько большим, что нестабильность положения маркерного импульса СП, формируемого с помощью пороговой схемы, оказывается недопустимой и превышает несколько элементов изображения. Кроме того, ток фотоприемника СП на темных местах сюжета может быть недостаточен для формирования маркерного импульса необходимой амплитуды.
Практически исключить влияние яркостных изменений в изображении (в поле зрения СП) на стабильность маркерного импульса позволяет фигура подсвета, формируемая на экране ВКУ в виде небольшой фигуры (курсора), например, кружка, крестика или квадратика. При попадании курсора в поле зрения СП вычисляют координаты точки фигуры курсора.
Яркость курсора поддерживается постоянно. Точность обвода контура зависит от искусства оператора.
Размеры курсора выбирают с таким расчетом, чтобы при максимальной скорости движения СП не выходило за время телевизионного кадра за пределы курсора (8-10 межстрочных расстояний).
Сигнал курсора через суммирующий видеоусилитель подается вместе с сигналом изображения исследуемого объекта на вход ВКУ.
Стабилизация яркости курсора позволяет формировать маркерный сигнал СП с пренебрежимо малой координатной нестабильностью и уменьшить погрешность формирования контурной линии до одного элемента разложения.
Совмещение в СП сенсорного поля (поля восприятия) и моторного поля (органа ввода управляющего воздействия) является эргономически удобным и эффективным методом организации интерактивного режима.
Недостатком СП является возможность разрывов в контурной линии, возникающих из-за неравномерности его движения по экрану ВКУ. Появление разрывов возможно.
Разрывы приводят к сбоям в работе устройств формирования стробоскопического сигнала и измерительных устройств. Эксперименты показали [93], что при привычных для оператора скоростях движения светового пера разрывы могут быть до 6-9 строк. Для исключения разрывов в контурной линии используется метод интерполяции. Он основан на формировании отрезков прямых, концевые точки которых совпадают с разрывами контурной линии.
Если в системе имеются две камеры, работающие синхронно и синфазно от одного синхронизатора, то в этом случае одну из камер можно использовать для выделения из рентгенограммы информативного участка с целью его дальнейшей обработки или анализа. Этот метод выделения фрагмента рентгенограмм использован в аппаратуре УАР-1 [5]. В режиме выделения информативного фрагмента снимка на столе оператора перед передающей трубкой одного из каналов устанавливается анализируемый снимок. Оператор, глядя на изображение на экране ВКУ, мягким карандашом или фломастером на бумаге, положенной в поле зрения второго канала, обводит контур вокруг измеряемого фрагмента снимка. Изображение контура телевизионной системой преобразуется в сигнал, который служит исходным сигналом для измерения геометрических пара-метров обведенного фрагмента или выделения этого фрагмента для дальнейшей обработки, например, цветового кодирования.
Кодирующие планшеты
К устройствам обвода информативных фрагментов изображений, которые не связаны с экраном ВКУ относятся кодирующие планшеты [93].
Планшет фирмы «Rand» (США) имеет рабочую область 250X250 мм. Основой устройства является проволочная сетка из 1024 близко расположенных проводников по каждому направлению координатных осей ix и у, закрепленных ш квадратной рамке. Каждый проводник выполнен из медной полоски шириной 75 и толщиной 25 мкм. Расстояние между осями проводников равно 250 мкм. Обе группы проводников разделены между собой тонкой маларовой пленкой. К каждому проводнику подводится свой двоично-кодированный сигнал, который воспринимается указкой. Для кодирования используется код Грея, причем код на соседних проводниках отличается только в одном разряде. В этом случае поверхность «записи» разнесена с экраном кинескопа ВКУ, но имеет с ним точное электронное совмещение (каждой точке планшета соответствует вполне определенный элемент растра кинескопа). Когда оператор рисует на поверхности планшета, то координаты положения точки контакта указки с поверхностью планшета в виде импульсов, закодированных кодом Грея, через емкостную связь воспринимаются кончиком указки.
Кончик указки воспринимает сигнал от ближайшего проводника. В указке расположен чувствительный усилитель, который усиливает принятый кодированный сигнал и через соединительный коаксиальный кабель передает его в декодирующую логическую схему и далее в ЗУ. Из запоминающего устройства траектория движения указки передается на экран ВКУ. В рисующей указке может находиться реальный пишущий элемент, так что след, оставленный на планшете, может не только отражаться на экране ВКУ, но и сохраняться на бумаге, покрывающей планшет.
К настоящему времени разработаны различные модификации планшетов [93]. Ввод координат положения указки может быть осуществлен на основе использования градиента напряжения на проводящей плате из резистивного материала [93]. К пластине периодически в течение некоторого определенного промежутка времени прикладывается разность потенциалов, например, в начале в горизонтальном, а затем в вертикальном направлениях. Указкой касаются проводящей поверхности в выбранной точке и снимают потенциал, соответствующий этому положению. Координаты х и у положения указки определяются путем измерения потенциалов в течение времени подачи напряжения в горизонтальном и вертикальном направлениях соответственно.

Рис. 48. Координатная сетка в кодирующих планшетах
Имеются планшеты, работающие на акустическом принципе. В планшете используются два плоских микрофона, расположенных вдоль смежных сторон рабочей области планшета. Эти микрофоны воспринимают акустические сигналы от указки в которой имеется искровой датчик из двух электродов, а два счетчика отмечают интервал времени между возбуждением искры и принятым звуковым импульсом. Значения времени задержки двух импульсов пропорциональны расстояниям указки от двух сторон планшета, на которых установлены микрофоны, поэтому эти величины могут быть приняты в качестве значения координат х и у положения указки. Эти и другие методы построения планшетов подробно рассмотрены в работах [55, 93].
Электронно-механические манипуляторы
К электронно-механическим методам управления курсором относятся кнопочный пульт, координатный шар, рукоятка управления.
При использовании кнопочного пульта направление перемещения курсора определяется оператором и им же подается команда для перемещения маркера в одно из 8 фиксированных направлений шкалы координатных приращений путем нажатия одной из кнопок пульта. Координатная сетка формируется генератором импульсов и накладывается на изображение. По узлам этой сетки и перемещается курсор (рис. 48). При этом способе управления координаты курсора определяются путем пересчета импульсов точечного растра до курсора отдельно по х и у координатам. Управление перемещением курсора заключается в изменении первоначального кода счетчика. Для перемещения курсора в любое из 8 фиксированных направлений достаточно во время обратного хода кадровой развертки подать cfc 1 импульс в один из счетчиков или одновременно в оба.
В случае использования для управления курсором координатного шара или рукоятки управления распознавание направления перемещения курсора происходит с помощью электронной схемы [93]. В этих устройствах (рис. 49) вырабатываются аналоговые напряжения или серии импульсов, которые несут информацию о положении подвижного элемента (шара или рукоятки управления).

Рис. 49. Перемещение курсора с координатным шаром
Шар представляет собой сферу диаметром 75–90 мм, которая может поворачиваться при помощи руки, соприкасающейся с ее поверхностью. Рукоятка управления это стержень (рычаг) высотой 50–100 мм и управление курсором осуществляется путем перемещения стержня в различные положения в пределах конуса ±30°– ±45°. Сигналы с электронно-механических манипуляторов после предварительного усиления и обработки поступают в блок формирования маркера (курсора). Здесь сигнал привязывается к растру телевизионной системы и определяются его координаты на растре. Для этих целей в блок формирования маркера подается измерительная решетка, которая формируется из сигналов генератора тактовых импульсов, синхронизированных с телевизионной системой. С выхода формирователя маркера сигнал поступает в цифровое устройство записи для запоминания следа контура выделяемого оператором фрагмента изображения. Из устройства памяти через блок микширования и коммутации маркер поступает на экран ВКУ.
Сравнительный анализ методов и устройств обвода информативных фрагментов изображения показал, что электронно-механический манипулятор типа «координатный шар» обладает наиболее высокой точностью и достаточным для большинства медицинских систем быстродействием. Метод позволяет по сравнению с методом второй камеры сократить объем аппаратуры, не требует бумаги, пишущих средств и имеет более высокую точность, чем СП.